6.3 Ray Marching
在本文的��部分,我将讨论如何在 Shadertoy 中使用光线行进算法。有许多优秀的在线教程教授光线行进,例如 Jamie Wong 的教程。为了帮助您可视化光线行进以及为什么它有时被称为球体追踪,Shadertoy 上的教程是一个宝贵的资源。
我将逐步帮助分解光线行进的过程,因此即使计算机图形经验很少,您也可以开始创建 3D 场景。
我们将创建一个简单的摄像机,以便我们可以在 Shadertoy 画布中模拟 3D 场景。让我们想象一下我们的场景首先会是什么样子。我们将从最基本的对象开始:球体。
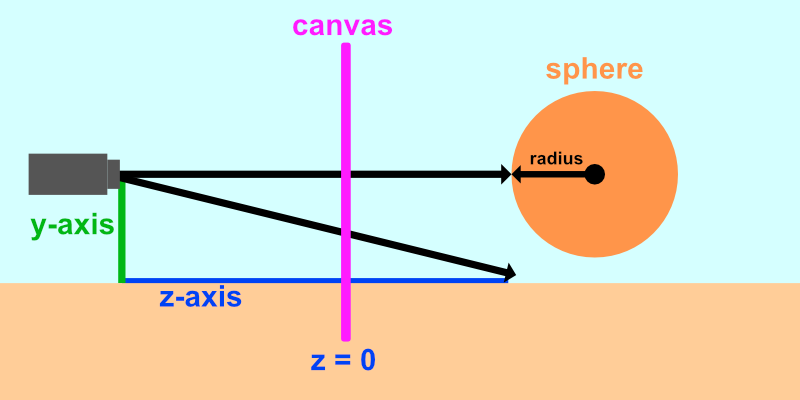
上图显示了我们将在 Shadertoy 中创建的 3D 场景的侧视图。未显示 x 轴,因为它指向查看器。我们的摄像机将被视为一个坐标为 (0, 0, 5) 的点,这意味着它沿 z 轴距离画布 5 个单位。与前面的教程一样,我们将重新映射 UV 坐标,使原点位于画布的中心。

上图以 x 轴(红色)和 y 轴(绿色)表示从我们的视角来看的画布。我们将从摄像机的视角查看场景。从摄像机直接射出的光线穿过画布的原点,将击中我们的球体。对角线光线以一定角度从摄像机发射并撞击地面(如果它存在于场景中)。如果光线没有击中任何东西,那么我们将渲染背景色。
现在我们了解了我们将要构建的内容,让我们开始编码吧!创建一个新的 Shadertoy 着色器,并将内容替换为以下内容以设置我们的画布:
void mainImage( out vec4 fragColor, in vec2 fragCoord )
{
vec2 uv = fragCoord/iResolution.xy; // <0, 1>
uv -= 0.5; // <-0.5,0.5>
uv.x *= iResolution.x/iResolution.y; // fix aspect ratio
vec3 col = vec3(0);
// Output to screen
fragColor = vec4(col,1.0);
}
为了使我们的代码更简洁,我们可以在一行而不是 3 行中重新映射 UV 坐标。我们现在已经习惯了这段代码的作用!
void mainImage( out vec4 fragColor, in vec2 fragCoord )
{
vec2 uv = (fragCoord - .5 * iResolution.xy) / iResolution.y; // Condense 3 lines down to a single line!
vec3 col = vec3(0);
// Output to screen
fragColor = vec4(col,1.0);
}
光线原点 ro 将是相机的位置。我们将它设置在我们正在查看的 “画布” 后面 5 个单位。
vec3 ro = vec3(0, 0, 5);
接下来,我们将添加光线方向 rd,该方向将根据像素坐标而变化。我们将 z 分量设置为 -1,以便每条光线都射向我们的场景。然后,我们将对整个向量进行归一化。
vec3 rd = normalize(vec3(uv, -1));
然后,我们将设置一个变量,该变量返回与光线行进算法的距离:
float d = rayMarch(ro, rd, 0., 100.);
让我们创建一个名为 rayMarch 的函数,用于实现光线行进算法:
float rayMarch(vec3 ro, vec3 rd, float start, float end) {
float depth = start;
for (int i = 0; i < 255; i++) {
vec3 p = ro + depth * rd;
float d = sdSphere(p, 1.);
depth += d;
if (d < 0.001 || depth > end) break;
}
return depth;
}
让我们更仔细地研究一下光线行进算法。我们从 0 的深度开始,然后逐渐增加深度。我们的测试点等于光线原点(我们的相机位置)加上深度乘以光线方向。请记住,光线行进算法将针对每个像素运行,并且每个像素将确定不同的光线方向。
我们获取测试点 p,并将其传递给 sdSphere 函数,我们将定义为:
float sdSphere(vec3 p, float r)
{
return length(p) - r; // p is the test point and r is the radius of the sphere
}
然后,我们将按 sdSphere 函数返回的距离值来增加深度。如果距离与球体的距离在 0.001 个单位以内,那么我们认为它离球体足够近。这表示精度。如果要使该值更准确,可以降低该值。
如果距离大于某个阈值(在本例中为 100),则光线走得太远,我们应该停止光线行进循环。我们不希望光线继续到无穷大,因为这会浪费计算资源,如果光线没有击中任何东西,就会使 for 循环永远运行。
最后,我们将根据光线是否击中某物来添加颜色:
if (d > 100.0) {
col = vec3(0.6); // ray didn't hit anything
} else {
col = vec3(0, 0, 1); // ray hit something
}
我们完成的代码应如下所示:
float sdSphere(vec3 p, float r )
{
return length(p) - r;
}
float rayMarch(vec3 ro, vec3 rd, float start, float end) {
float depth = start;
for (int i = 0; i < 255; i++) {
vec3 p = ro + depth * rd;
float d = sdSphere(p, 1.);
depth += d;
if (d < 0.001 || depth > end) break;
}
return depth;
}
void mainImage( out vec4 fragColor, in vec2 fragCoord )
{
vec2 uv = (fragCoord-.5*iResolution.xy)/iResolution.y;
vec3 col = vec3(0);
vec3 ro = vec3(0, 0, 5); // ray origin that represents camera position
vec3 rd = normalize(vec3(uv, -1)); // ray direction
float d = rayMarch(ro, rd, 0., 100.); // distance to sphere
if (d > 100.0) {
col = vec3(0.6); // ray didn't hit anything
} else {
col = vec3(0, 0, 1); // ray hit something
}
// Output to screen
fragColor = vec4(col, 1.0);
}
我们似乎在重用一些数字,所以让我们设置一些常量全局变量。在 GLSL 中,我们可以使用 const 关键字告诉编译器我们不打算更改这些变量:
const int MAX_MARCHING_STEPS = 255;
const float MIN_DIST = 0.0;
const float MAX_DIST = 100.0;
const float PRECISION = 0.001;
或者,我们也可以使用 preprocessor 指令。您可能会看到人们在定义常量时使用 #define 等预处理器指令。使用 #define 的一个优点是,您可以使用 #ifdef 来检查变量是否在稍后的代码中定义。#define和const 之间存在差异,因此请选择你喜欢的 const 以及最适合你的方案的 const。
如果我们重写常量变量以使用 #define 预处理器指令,则我们将得到以下内容:
#define MAX_MARCHING_STEPS 255
#define MIN_DIST 0.0
#define MAX_DIST 100.0
#define PRECISION 0.001
请注意,我们不使用等号,也不在使用预处理器指令的每一行末尾包含分号。
#define 关键字允许我们定义变量和函数,但出于类型安全性,我更喜欢使用 const 代替。
使用这些常量全局变量,代码现在应如下所示:
const int MAX_MARCHING_STEPS = 255;
const float MIN_DIST = 0.0;
const float MAX_DIST = 100.0;
const float PRECISION = 0.001;
float sdSphere(vec3 p, float r )
{
return length(p) - r;
}
float rayMarch(vec3 ro, vec3 rd, float start, float end) {
float depth = start;
for (int i = 0; i < MAX_MARCHING_STEPS; i++) {
vec3 p = ro + depth * rd;
float d = sdSphere(p, 1.);
depth += d;
if (d < PRECISION || depth > end) break;
}
return depth;
}
void mainImage( out vec4 fragColor, in vec2 fragCoord )
{
vec2 uv = (fragCoord-.5*iResolution.xy)/iResolution.y;
vec3 col = vec3(0);
vec3 ro = vec3(0, 0, 5); // ray origin that represents camera position
vec3 rd = normalize(vec3(uv, -1)); // ray direction
float d = rayMarch(ro, rd, MIN_DIST, MAX_DIST); // distance to sphere
if (d > MAX_DIST) {
col = vec3(0.6); // ray didn't hit anything
} else {
col = vec3(0, 0, 1); // ray hit something
}
// Output to screen
fragColor = vec4(col, 1.0);
}
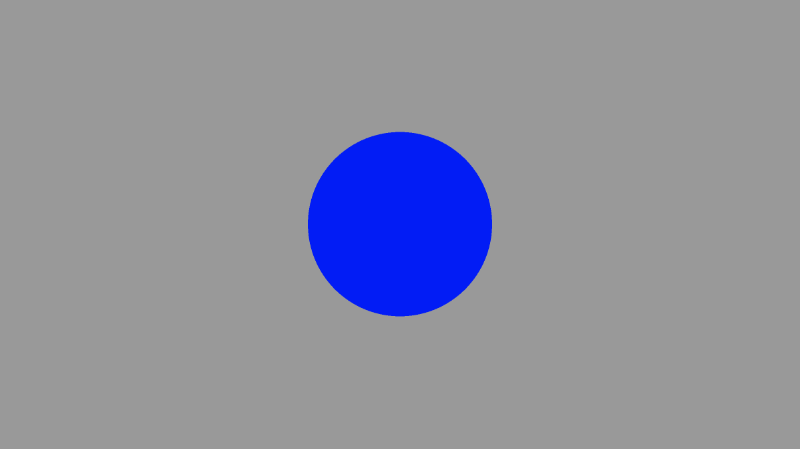
当我们运行代码时,我们应该会看到一个球体的图像。它看起来像一个圆圈,但它绝对是一个球体!
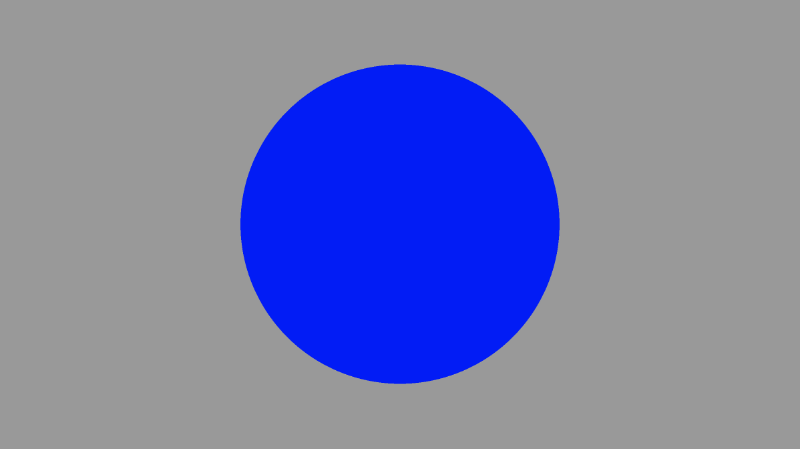
如果我们改变相机的位置,我们可以放大和缩小以证明我们正在查看 3D 对象。将场景中摄像机和虚拟画布之间的距离从 5 增加到 3 应该会使球体看起来更大,就像我们向前移动了一点一样。
vec3 ro = vec3(0, 0, 3); // ray origin
不过有一个问题。目前,我们的球体中心位于坐标 (0, 0, 0),这与我之前介绍的图像不同。我们的场景设置为摄像机非常靠近球体。
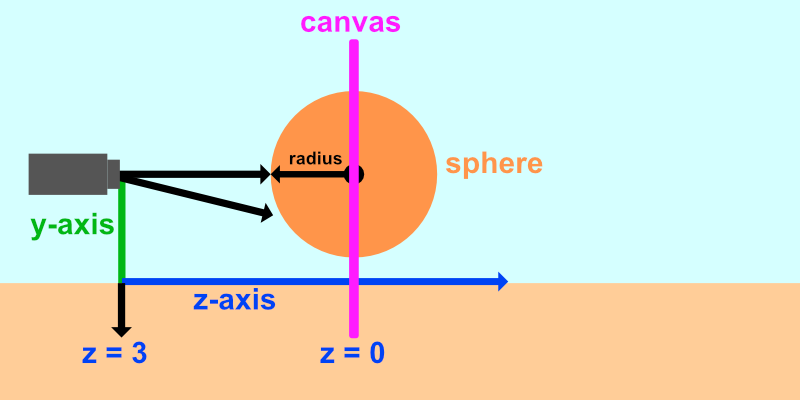
让我们向球体添加一个偏移量,类似于我们在本教程系列的第 2 部分中对圆所做的操作。
float sdSphere(vec3 p, float r )
{
vec3 offset = vec3(0, 0, -2);
return length(p - offset) - r;
}
这将使球体沿 z 轴向前推两个单位。这应该会使球体看起来更小,因为它现在离摄像机更远了。